University of Illinois at Urbana-Champaign
Coordinated Science Laboratory (CSL)
The Coordinated Science Laboratory is an internationally respected leader in telecommunications and information technology research since established in 1951. CSL maintains a very rich computing environment of approximately 1,350 machines and an HP/AMD Cluster with a 512 CPU with 3 terabytes of storage. The HP/AMD Cluster is excellent for running highly parallel and computationally intensive simulations with 1 gigabyte of RAM per core and an 8 Gigabit per second lnfiniband interconnect. For experiments, the flying arena at CSL Intelligent Robotics Laboratory (IRL), which comprises a 26’x30’ space, is dedicated to flying and ground robot testing. A state-of-the-art VICON motion capture system, including 8 infrared Vicon cameras capable of precise position and attitude tracking at 300 Hz sampling frequency, is available in IRL. IRL will be used to perform tests of a fleet of coordinated ground and aerial autonomous robots on currently available robot implementation platforms, such as Qualcomm Snapdragon Flight and Crazyflie 2.0.




Siebel Center – Computer Science Department
Department of Computer Science harbors a storage cloud, called Illinois CCT (Cloud Computing Testbed) cloud where CS faculty can store their data. CCT has 128 HP Dl 160 Compute Building Blocks each equipped with 2 quad-core CPUs, 16 GB RAM, and 2 TB storage. Furthermore, the CCT has 2 HP DL 380 Head Nodes, and 4 HP DL 380 File Servers with 72 TB attached external storage which is utilized in our project.
National Petascale Computing Facility
The state-of-the-art 88,000-square-foot National Petascale Computing Facility (NPCF) is located at the corner of Oak Street and St. Mary’s Road on the University of Illinois’ south campus and houses Blue Waters and other NCSA major infrastructure, as well providing office space for NCSA and vendor staff members. NPCF is a highly efficient, environmentally-friendly facility and one of the very few data centers to achieve LEED Gold certification.
NCSA and Its Computational and Data Resources
The National Center for Supercomputing Applications (NCSA) is one of the country’s premier facilities for computation. NCSA is located at the University of Illinois at Urbana-Champaign and since established in 1986, NCSA has been a leader in deploying robust high-performance computing resources and in working with research communities to develop new computing and software technologies. The Blue Waters project at NCSA provides the national research community sustained-petaflop supercomputer and is a landmark petascale system with a peak speed of 12 PF, 1.5 PB of memory, 26 PB of user-accessible online storage, 300 PB of usable near-line storage, and 400 Gbps in external networking capability. iForge is NCSA’s premiere and dedicated HPC resource for Private Sector Partners, which features two distinct hardware platforms, each configured for a different set of computational needs.
Information Trust Institute (ITI)
ITI provides national leadership combining research and education with industrial outreach in trustworthy and secure information systems by creating computer systems, software, and networks that society can depend on to be trustworthy. ITI’s current major centers include TCIPG, the Trustworthy Cyber Infrastructure for the Power Grid center (funded by DOE and DHS); the Science of Security (SoS) Lablet (funded by the DoD); the Assured Cloud Computing University Center for Excellence (ACC-UCoE, funded by AFOSR/AFRL); the Boeing Trusted Software Center; and the Illinois Center for a Smarter Electric Grid (ICSEG, funded by the Illinois Department of Commerce & Economic Opportunity). ITI research is conducted both in its in-house facilities and in a range of other facilities located in departments and units across the University of Illinois campus, including the Coordinated Science Laboratory, the Siebel Center for Computer Science, Everitt Laboratory, the Beckman Institute, and the National Center for Supercomputing Applications (NCSA), among others.
Advanced Controls Research Laboratory (ACRL) Equipment and Facilities
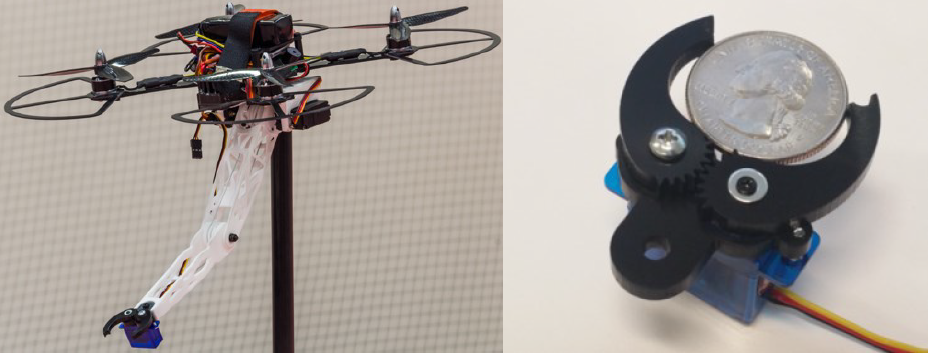
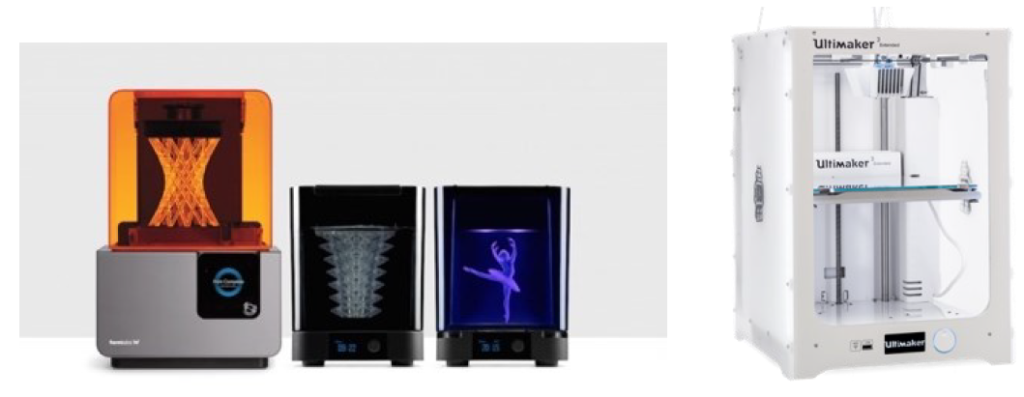
ACRL is equipped with additional robotic platforms and testing equipment in addition to the platforms at IRL. ACRL has a motion capture system, with 9 infrared Vicon Vantage V16 wide-angle cameras capable of precise position and attitude tracking at up to 2000 Hz sampling frequency and up to 16MP resolution (at 120Hz). The flying test platform for implementing the developed algorithms at ACRL includes Intel Aero Ready-to-Fly (a Linux-based vehicle with an Intel Atom, depth-sensing and monocular cameras, GPS, IMU, PX4 compatibility, ROS integration, and 800g payload capacity) and Q2 Custom Platform (built upon the Crazyflie 2.0 platform). The ground robot available at ACRL is the Clearpath Jackal. Jackal is an all-terrain, differential drive robot featuring Wi-Fi, Bluetooth, ROS integration, GPS, IMU, and a FLIR Flea3 CMOS camera. The vehicle weighs 37 lbs and can carry a payload of up to 44 lbs. Ultimaker 3 Extended and Formlabs Form 2 are the 3D printing equipment available at ACRL for fast prototyping.


North Carolina A&T State University
TECHLAV Center
Testing, Evaluation, and Control of Heterogeneous Large Scale systems of Autonomous Vehicles (TECHLAV) Center (http://techlav.ncat.edu/), led by Drs. Homaifar and Karimoddini, administers several laboratories totaling approximately 4,000 sq. ft. located in the Fort Interdisciplinary Research Center (IRC) building at NC A&T State University. The TECHLAV Center is dedicated to conducting research in autonomous and intelligent systems and addresses the simulation and validation of the algorithms being developed for intelligent and cooperative control of distributed agents such as teams of Unmanned Aerial Vehicles (UAVs) and mobile robots. The TECHLAV Autonomous Laboratory is equipped with a VICON System, two Intel Drones, and nine AR. Drones, two indoor PIONEER-DX robots, and four outdoor PIONEER-AT robots that have the capability of all-terrain navigation. An available STK Software helps researchers model projects that have no access to a real aircraft to be modeled. The research currently being conducted in this Center includes sensor technology, signal conditioning and processing, satellite image and information processing, intelligent mobile agent control, smart cars, and driver safety.




ACCESS Laboratory
The Autonomous Cooperative Control of Emergent Systems of Systems (ACCESS) laboratory (http://accesslab.net/), directed by Dr. Karimoddini, hosts a multi-agent cooperative testbed and is dedicated to conducting cross-disciplinary research on the control and coordination of large-scale systems of autonomous systems. The testbed consists of several autonomous Unmanned Aerial Vehicles (UAVs), Unmanned Ground Vehicles (UGVs), and an accurate infrared-based VICON motion capturing system for localization and a reliable decentralized communication system for data exchange between the mobile agents. ACCESS lab is aiming at developing tools, techniques, and design methods that are required for modeling, control, testing, and evaluation of multi-robot systems

NC A&T Research Farm
NCAT’s 492-acre farm will be available for conducting the flight test. The lab also has several professional pilots with 107 certificates.

Georgia Institute of Technology
Autonomous Control and Decision Systems laboratory (ACDS) and indoor testing facilities
The ACDS lab is equipped with 11 work-stations for graduate students to perform simulations and numerical experiments for machine learning, stochastic control, optimization, and perception algorithms, supporting MATLAB, SIMULINK, C++, C, Python, Mathematical as well as software environments for deep learning. For indoor robot testing, the ACDS lab is equipped with an omnidirectional mobile platform with a 7DOF arm and a mounted hand. The platform is equipped with sensors such as Kinect, cameras, IMU, and tactile force sensors and is used for research on search and rescue, inspection, exploration and localization, mobile manipulation, and human-robot interaction. The ACDS lab is also equipped with a VICON system for tracking objects in 3D space as well as Unmanned Aerial Vehicles quad-rotors. The Co-I also has access to an Indoor Flight Test Facility (IFL) to perform experiments with drones and small-scale flying vehicles.

Outdoor testing facilities with ACDS lab
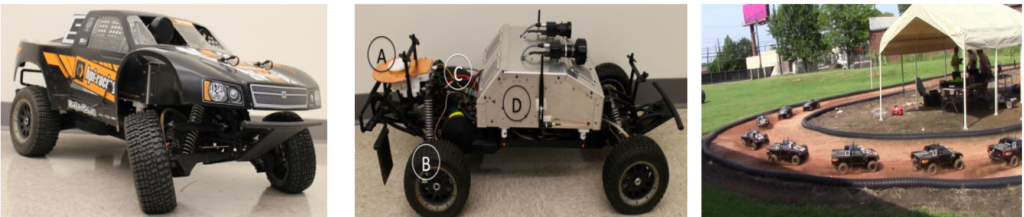
For outdoor experiments, the completed AutoRally platform is specifically designed to research perception and control at high speeds in unstructured environments. There are three research vehicles available, each equipped with CPU/GPU architectures and many onboard sensors, including time-synchronized stereo cameras, high precision IMU, RTK corrected GPS, and wheel speed sensors. In addition, the Co-I has access to two small size testing track facilities. The Georgia Tech Autonomous Racing Facility is a dirt oval track with a 3.3m wide surface and outer dimensions of 27.5m by 15.5m, located on the main Georgia Tech campus. The second track is located at the GTRI CCRF facility north of Georgia Tech campus, with 15ft wide, 550 ft long, and is used for longer duration experiments and for extensive testing of stochastic control and machine learning algorithms. The Co-I also has access to a 1km long single-lane gravel road through wooded terrain and a 120-acre parcel in Georgia near Greenville with a mix of open land and wooded areas, for more challenging and multi-terrestrial driving experiments.


Massachusetts Institute of Technology
The REALM has two standalone Deep Learning workstations equipped with a high-performance CPU and 4 NVidia RTX2080TI GPUs under Ubuntu 20.04 system for computations. The dedicated servers are useful both for prototyping learning-enabled controllers and for scalable training of high-performance deep learning systems. The Co-I Fan also has a dedicated 20 ft. by 20 ft. space with 10 ft. ceilings and a Bitcraze Loco radio time-of-flight localization system, which is used for rapid prototyping and testing of autonomy algorithms on the lab’s ground robots and quadrotors. For robot platforms, Co-I Fan owns multiple ground robots and quadcopters of different scales that can be used for the integration and validation of algorithms. The ground robots include five Turtlebot 3 differential drive ground robots, equipped with a Raspberry Pi for onboard computation, along with an IMU and Lidar 360-degree range sensor. The quadrotors include 10 Bitcraze CrazyFlie 2.1 micro- UAVs, which enable research into multi-agent control strategies. Each micro-UAV provides onboard computation, an IMU, and time-of-flight localization.
Other testing facilities @ MIT
REALM also has access to the MIT Kresa Center for Autonomous Systems – an 80 ft. by 40 ft. space with 25-ft. ceilings, with Vicon Optical Motion Capture System custom-designed for MIT’s work with all types of autonomous vehicles, including rotor and fixed-wing aircraft. Co-I Fan’s group also has access to the network of machine shops and maker spaces affiliated with MIT AeroAstro. MIT AeroAstro has a newly-built wind tunnel that permits a test speed of up to 200 miles per hour with advanced research data acquisition equipment, which can provide an ideal testing environment for flying robots.
University of Nevada, Reno
Robotic Workers Lab
The Robotic Workers (RoboWork) Lab is led by Dr. Christos Papachristos and focuses on the domain of innovative long-term resilient aerial robotics as well as autonomous robotic resourceful physical interaction. The RoboWork Lab’s active research encompasses the domains of a) aerial robotic development, b) multimodal resilient perception, c) autonomous motion planning, d) intelligent navigation, and e) mobile manipulation and physical interaction. The aerial robotic platforms available at RoboWork lab include four rapidly prototypeable novel hybrid reconfigurable aerial robots, two DJI Matrice M100-class UAVs, two DJI Matrice M600-class UAVs, and two DJI Ryze Tello micro-sized quadrotors, and three custom-developed Multirotors. In addition, there is an in-house developed Autonomous Mobile Manipulation system available. The supporting software platforms include multiple other computers for robotics development, sensors including cameras and LiDAR for data acquisition, and one powerful desktop for Deep-Learning tasks.

Facilities at UNR Mechanical Engineering Department
Petros Voulgaris and his students have access to extensive material fabrication and testing equipment at the Applied Research Facility and the Harry Reid Engineering Laboratory, as well as a full-service machining and welding shop on-site at the Palmer Engineering Manufacturing Lab, dedicated to the fabrication of research equipment and student projects.
Autonomous Robots ARENA
The ARENA environment is a Motion Capture-assisted robotic prototyping/system testing/research infrastructure operating under the office of VPRI. It integrates a Motion Capture system comprising a set of 12 VICON Vantage V8 cameras (providing sub-mm and sub-degree accuracy when tracking markers that allow defining various object geometries) covering a total volume of 15m x 7m x 5m [LxWxH], allowing the deployment of aerial and ground systems alike. It is equipped with wireless networking support and a multi-system support infrastructure built around the open-source Robot Operating System (ROS) framework for seamless integration with a wide class of robotic systems. Additionally, it offers exceptional means to integrate undergraduate and graduate students into robotics research.

Synergies with other bodies of UNR and the FAA Test Site
UNR has established the Nevada Advanced Autonomous Systems Innovation Center (NAASIC) and the Nevada Center of Applied Research (NCAR) aiming to accelerate research-industry collaborations. UNR personnel and our team have Certificates of Waiver or Authorization (COA) for testing of UAVs and beyond the line of sight operation within the state of Nevada, which is one of the six FAA-designated sites. Long flight operations are conducted at Stead-Airport and Hawthrone, and Class-G Airspace operations up to 1200ft AGL at daytime and 400ft AGL at nighttime are authorized by the Nevada UAS Test Site.

CSE Teaching Lab
Computer Science & Engineering Department includes a state-of-the-art Engineering Computing Lab with Windows and Linux workstations. Instructional facilities of the UNR Robotics Teaching Lab include 16 Dell PCs, with 16 LEGO NXT Robotic Kit enhanced with additional sensors and motors.
ME Undergraduate Instructional Laboratories
These facilities house a total of 15 measurement and computer data acquisition workstations, with facilities for measuring and controlling pressure, temperature, heat transfer, strain, vibration, fluid velocity and flow rate, and material properties.
Sierra Nevada Corporation
Simulation Environment for SNC’s Enhanced Vision System
Sierra Nevada Corporation (SNC) has developed an Enhanced Vision System (EVS) for helicopter pilots operating in degraded visual environments (DVE). SNC’s EVS system overcomes these limitations by creating a 3D world model of the operational environment by fusing a priori obstacle and terrain data with real-time sensor measurements. These measurements include LiDAR, radar, and IR cameras fused with a high-assurance pose estimate. SNC’s EVS system is TRL9 and is currently fielded for manned helicopter flights. To transition the developed technologies, SNC will provide a simulation environment containing a high-fidelity government-owned non-linear model of the Blackhawk helicopter to evaluate the L1 adaptive control in dynamically uncertain environments (e.g., strong winds). To evaluate the perception and path planning methods, SNC will provide a simulation environment of the EVS sensor configuration on a helicopter in a variety of relevant environments.

Lockheed Martin
High-Fidelity Aircraft Simulation Environments
Lockheed Martin (LM) will explore multiple high-fidelity environments, including but not limited to prior NASA-LM partnerships such as the X-59 Low Boom Flight Demonstrator, X-56 SUAS, and the NASA-LM Auto-Ground- Collision-Avoidance protection system for the F-16. A special focus will be on the F-16 simulation environment with high-fidelity actuation and effectors, hardware in the loop throughput delays, and atmospheric disturbance models.
